Что такое синхронный двигатель и где он используется
Содержание:
- Устройство синхронного двигателя
- Задать вопрос. Указать на ошибку в данных. Мини форум о заводских спецификациях колес и дисков для ВАЗ 2101 Жигули, а также варианты их замены
- Теория работы
- Способы пуска
- Синхронные двигатели: устройство и принцип действия
- Подключить двигатель к однофазной цепи
- Конструкция синхронного устройства
- Принцип действия [ править | править код ]
- Устройство и принцип работы
- Регулирование частоты вращения асинхронных двигателей
- Электромагнитные процессы и вращение
- Комментарии
- 23 факта для общего развития (на тему «век живи — век учись»)
- Citroen Berlingo, 2015 г.
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Задать вопрос. Указать на ошибку в данных. Мини форум о заводских спецификациях колес и дисков для ВАЗ 2101 Жигули, а также варианты их замены
Теория работы
Когда на двигатель подается питание переменного тока, полюса статора находятся под напряжением. Это, в свою очередь, притягивает полюса ротора, таким образом, полюса статора и ротора магнитно блокируются. Именно эта блокировка заставляет ротор вращаться с одинаковой синхронной скоростью с полюсами статора. Синхронная скорость вращения задается выражением Ns = 120f / P.
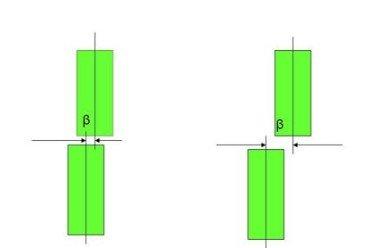
Когда нагрузка на двигатель постепенно увеличивается, ротор, несмотря на то, что он вращается с одинаковой скоростью, имеет тенденцию постепенно снижаться по фазе на некоторый угол, «β», называемый Угол нагрузки или Угол сцепления. Этот угол нагрузки зависит от величины нагрузки, на которую рассчитан двигатель. Другими словами, мы можем интерпретировать, как развиваемый двигателем крутящий момент зависит от угла нагрузки «β».
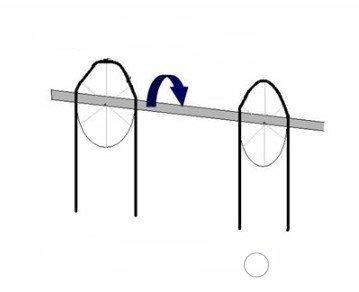
Электрическую работу синхронного двигателя можно сравнить с передачей мощности механическим валом. На рисунке показаны два шкива, «A» и «B». Предполагается, что шкив «A» и шкив «B» установлены на одном валу. «А» передает мощность от привода через вал, в свою очередь заставляя «В» вращаться, передавая мощность нагрузке.
Два шкива, которые прикреплены к одному валу, можно сравнить с блокировкой между полюсами статора и ротора.
Если нагрузка увеличивается, шкив «B» передает увеличение нагрузки на вал, что проявляется в скручивании вала.
Таким образом, поворот вала можно сравнить с ротором, падающим по фазе со статором.
Угол кручения можно сравнить с углом нагрузки «β». Также, когда нагрузка увеличивается, сила скручивания и угол закручивания увеличиваются. Таким образом, угол нагрузки «β» также увеличивается.
Если нагрузка на шкив «B» увеличивается до такой степени, что он заставляет вал крутиться и ломаться, то передача мощности через вал прекращается, когда вал ломается. Это можно сравнить с ротором, выходящим из синхронизма с полюсами статора.
Таким образом, синхронные двигатели могут работать либо с синхронной скоростью, либо они останавливаются.
Способы пуска
За счет значительной инерции ротора он не способен сдвинуться под нагрузкой полем статора. В случае подачи рабочего напряжения не удастся получить устойчивую магнитную связь и вращение не начнется. Для решения этой задачи применяются способы запуска ротора до определенной скорости вращения. Как правило, это то число оборотов, которое приближается к значению в режиме синхронной работы.
Среди наиболее распространенных способов приведения синхронного двигателя в движение можно выделить:
- Асинхронный пуск – этот способ обеспечивается путем введения в конструкцию ротора стальных элементов в форме беличьей клетки. При подаче напряжения в клетке наводится ЭДС и возникает магнитное взаимодействие. Основным недостатком данного способа являются большие пусковые токи, в разы превышающие номинальный режим синхронного двигателя. Поэтому в схеме запуска используются реакторы или автотрансформаторы для снижения негативного воздействия.
- Частотный пуск – обеспечивается посредством частотных преобразователей. Которые снижают частоту питающего напряжения на рабочих обмотках. Это позволяет замедлить скорость вращения магнитного поля синхронного двигателя. Благодаря чему начинается вращение ротора.
- Двигательный пуск – для начала движения вал синхронного агрегата подсоединяется к разгонному двигателю. На этапе старта вращение обеспечивается от приводной электрической машины. Как только основной двигатель выйдет на подсинхронную скорость, разгонный агрегат выводится из работы.
Для каждого из способов используются соответствующие схемы и оборудование, позволяющие оптимизировать режим работы. Поэтому далее рассмотрим несколько характерных примеров для каждого способа запуска.
Асинхронный пуск
В этом способе используются синхронные двигатели специального типа, но скорость нарастания тока и его величину в рабочих обмотках принудительно снижают. Для этого устанавливаются реакторы или автотрансформаторы.
Как видите на схеме, в цепь питания каждой фазной обмотки синхронного двигателя устанавливается реактор. При включении контактора К2 напряжение подается на обмотки ток в реакторе не может вырасти скачкообразно. Поэтому пуск электродвигателя получается более плавным, чем в случае прямого включения. При разгоне электрической машины до подсинхронной скорости шунтирующий выключатель К1 выводит индуктивный элемент из цепи и агрегат работает в штатном режиме.
В данной схеме происходит автоматическое снижение напряжения на рабочих обмотках синхронного двигателя за счет автотрансформатора. Регулятор Р3 плавно повышает разность потенциалов до установившейся величины, ток при этом пропорционально нарастает. После достижения номинального момента, выключатель К1 зашунтирует автотрансформатор. Этот способ позволяет снижать пусковые токи со значительно большим усилием, чем в случае применения реакторов.
Частотный пуск
Основой современного частотного пуска являются схемы на полупроводниковых элементах, как правило, тиристорных преобразователях. Такие устройства снижают частоту изменения кривой напряжения, но практически не нарушают действующее значение.
Такой способ запуска сокращает время на разгон синхронного двигателя и снижает значение токовой нагрузки в момент пуска. Однако, современная схема частотного пуска имеет куда более сложную реализацию:
Двигательный пуск
Способ двигательного запуска предусматривает одновременную установку на один вал и синхронного, и разгонного двигателя. Старт вращения обеспечивает асинхронный разгонный электродвигатель, который легко набирает обороты под нагрузкой. Синхронный агрегат включается в работу при достижении подсинхронной скорости вращения.
Однако существенным недостатком такого способа является длительный промежуток времени от старта до момента вхождения электрической машины в синхронизм.
Источник
Синхронные двигатели: устройство и принцип действия
Основные части синхронного двигателя – это якорь (статор, неподвижная часть) и индуктор (ротор), разделенные воздушной прослойкой. В пазы статора закладывают трехфазную распределенную обмотку – обычно она соединяется «звездой».
Рис. 2 Схема синхронного двигателя
С началом работы двигателя тока, подаваемые в якорь, создают вращение магнитного поля, которое пересекает поле индуктора, что в результате взаимодействия двух полей переходит в энергию. Поле якоря чаще называют иначе – поле реакции якоря. В генераторах такое получают при помощи индуктора. Входящие в состав индуктора электромагниты постоянного тока принято называть полюсами. При этом индукторы во всех синхронных двигателях могут исполняться по двум схемам – явнополюсной и неявнополюсной, различающиеся между собой расположением полюсов. Чтобы уменьшить значение магнитного сопротивления и тем самым улучшить условия для прохождения магнитного потока, применяют ферромагнитные сердечники. Они располагаются в статоре и роторе, для их изготовления используют специальную марку стали – электротехническую, отличающую высоким содержанием кремния – это позволяет уменьшить вихревые токи и повысить электрическое сопротивление стали.
Рис. 3. Магнитные поля в синхронном двигателе
В основу работы синхронного двигателя положен принцип взаимного влияния полюсов индуктора и магнитного поля, индуцируемого якорем. При запуске осуществляется разгон двигателя до частоты, которая близка по своему значению частоте, с которой происходит в зазоре вращение магнитного поля. Только при выполнении этого условия двигатель переходит в функционирование в синхронном режиме. В данный момент пересекаются магнитные поля, инициируемые индуктором и ротором. Этот момент в технической литературе принято называть входом в синхронизацию.
Работа синхронного двигателя наглядно представлена на видео:
Длительное время в качестве разгонного двигателя использовался стандартный синхронный двигатель, который был механически соединен с синхронным. Благодаря этому, ротор на синхронном двигателе механически разгонялся до подсинхронной скорости, а затем уже самостоятельно, за счет взаимодействия электромагнитных полей, втягивался в синхронизм. Обычно при подборе мощности пускового двигателя исходили из соотношения 10-15% от номинальной мощности разгоняемого двигателя. Такого запаса мощности вполне хватало запустить синхронный двигатель не только в холостую, но даже и при незначительной нагрузке на валу.
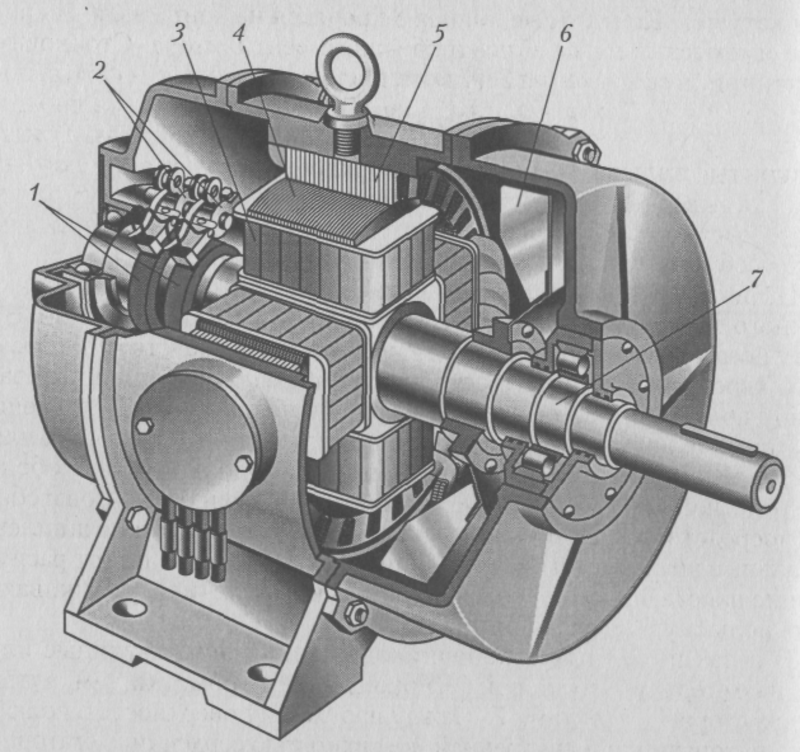
Рис. 4 Синхронный двигатель (1) с внешним разгонным (2) двигателем
Такой способ разгона усложняет и существенно удорожает общую стоимость, поэтому в современных двигателях от него отказались в пользу разгона в состоянии асинхронного режима. В этом случае с помощью реостата (короткозамкнутым путем) обмотки индуктора замыкают, как в асинхронном двигателе. Чтобы провести запуск двигателя в таком режиме, на ротор устанавливают короткозамкнутую обмотку, выступающую одновременно и как успокоительная обмотка, устраняющая во время проведения синхронизации раскачивание ротора. В момент, когда скорость вращения достигнет требуемого номинального значения, в индуктор будет подан постоянный ток. Но для двигателей, в которых стоят постоянные магниты, все равно придется для разгона использовать внешние двигатели.
В криогенных синхронных машинах используется так называемая обращенная конструкция, при которой размещение индуктора и якоря выполнено наоборот, т.е. индуктор расположен на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения состоят из материалов, обладающими свойствами сверхпроводимости.
Подключить двигатель к однофазной цепи
Изготовленный для работы от трёхфазного источника питания электромотор может работать и от домашней однофазной сети, но при этом существенно снизятся его характеристики, такие как КПД, коэффициент мощности. Кроме того, снизятся мощность и пусковые показатели.
Если же без подключения не обойтись, то требуется из трёх обмоток статора собрать схему, где их будет только две. Одна рабочая, а другая пусковая. Например, есть три катушки с началами С1, С2, С3 и концами С4, С5, С6 соответственно. Для создания первой (рабочей) обмотки двигателя объединяем концы С5 и С6, а их начала С3 и С2 подключаем к источнику однофазного тока, например, бытовой сети 220 вольт. Роль второй, пусковой обмотки, будет выполнять оставшаяся незадействованная катушка стартера. Она подключается к источнику питания через конденсатор, соединённый с ней последовательно.
Конструкция синхронного устройства
Принцип работы и устройство синхронных машин остаются понятными даже для неопытных потребителей. К ключевым составляющим системы относят следующие узлы:
- Статор — представляет собой неподвижную часть установки, на которой расположено три обмотки. Они соединены по схеме «звезда» или «треугольник». В качестве материала для изготовления статора используются пластины из суперпрочной электротехнической стали.
- Ротор — подвижный элемент двигателя, оснащенный обмоткой. Во время работы установки эта обмотка пропускает определенное напряжение.
Между зафиксированной и подвижной частью системы находится небольшая воздушная прослойка, гарантирующая сбалансированную работу мотора и беспрепятственное воздействие магнитного поля на ключевые составляющие агрегата. Также в двигателе установлены подшипники, необходимые для вращения ротора, и клеммная коробка. Последняя находится в верхней части механизма.
Принцип действия [ править | править код ]
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f : n c = 60 f p =<60f>
>>
При частоте 50 Гц получаем для p = 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля n c > = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.
С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.
Электромагнитные процессы и вращение
Намагниченный ротор тянется за полем статора и поэтому вращается синхронно с ним. В этом и состоит принцип действия синхронного двигателя. Магнитный поток в теле ротора в основном определяет крутящий момент на вале движка. Чем больше магнитный поток, тем больше крутящий момент. При этом независимо от нагрузки на вал (в определенных пределах) его скорость вращения не изменяется. Меняется только взаимное положение полей статора и ротора, но не скорости вращения.
По мере увеличения нагрузки на вал полюсы ротора оказываются все больше позади поля статора. Число n оборотов в минуту ротора рассматриваемого двигателя зависит от того, сколько пар полюсов p у статора. Если он запитан переменным напряжением с частотой f , используется формула
В результате изменения положения ротора под нагрузкой уменьшается магнитный поток в сердечнике статора. Вследствие этого ток статора увеличивается и компенсирует уменьшение магнитного потока, противодействуя нагрузке на вале движка. Аналогичные процессы происходят в нагружаемом трансформаторе. Полюсы статора и ротора все больше удаляются друг от друга по мере увеличения нагрузки. Но частота оборотов остается неизменной до определенного момента.
Как только электромагнитные параметры конструкции статора оказываются меньше некоторого предельного значения, ротор останавливается. Время до полной остановки определяет привод, использующий синхронный электродвигатель. Конструкция ротора без специальных технических решений не позволяет получить крутящий момент за счет скольжения, как в асинхронном двигателе. То же самое получится, когда синхронные двигатели запускаются — скольжение отсутствует.
Но конструкция, в которой много пар полюсов и медленное вращение ротора, может быть исключением. На самостоятельный пуск движка влияет масса ротора и скорость перемещения поля статора мимо ротора. Обычно сила их взаимодействия может преодолеть инерцию ротора. Но после принудительной раскрутки тем или иным способом. Только при этих стартовых условиях возможна работа синхронного двигателя. Начальная скорость для входа в синхронизм обычно близка к параметрам вращающегося магнитного поля статора.